
Leçon 2 :Les déplacements du robot |
Pour déplacer le robot, vous disposez de trois commandes: Avancer,
Tourner à droite, Tourner à gauche. Ces commandes
sont écrites dans des blocs de forme rectangulaire disponibles dans la
palette d'outils (voir ci-contre).
La commande Avancer fait avancer le robot d'une case devant lui.
![]() Comme vous
l'avez vu à la leçon 1, si le robot
est en face d'un mur quand cette commande est exécutée, il s'écrase
contre le mur. C'est une erreur d'exécution, le programme s'arrête.
Comme vous
l'avez vu à la leçon 1, si le robot
est en face d'un mur quand cette commande est exécutée, il s'écrase
contre le mur. C'est une erreur d'exécution, le programme s'arrête.
Les commandes Tourner à droite et Tourner à gauche
font faire un quart de tour au robot vers sa droite ou sa gauche. Le robot reste
sur la même case.
 |
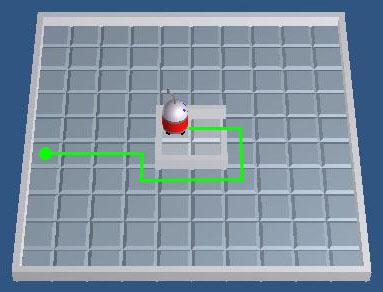
Faites parcourir à votre robot le trajet vert ci-dessous.
Dans la fenêtre programme, vous pouvez sélectionner
l'objectif Aller devant un mur. A la fin de l'exécution,
RobotProg vérifiera si l'objectif a été atteint. Sauvegardez ensuite votre programme. |
|
Ecrivez un nouveau programme où le robot avance de deux cases,
fait demi-tour, et retrourne à sa case de départ. Exécutez
ce programme. |

   |